ICACT20220096 Slide.01
[Big Slide]
[YouTube] ICACT20220096 Slide.01
[Big Slide]
[YouTube] |
Chrome  Click!! Click!! |
 |
Hello everyone. It is my pleasure to attend this conference. The content of my presentation is “A Survey of UAV Clustering Algorithm”. |
| ICACT20220096 Slide.02
[Big Slide]
[YouTube] |
Chrome Click!! |
 |
My presentation includes Introduction, Related Work, Comparison and Conclusion. |
| ICACT20220096 Slide.03
[Big Slide]
[YouTube] |
Chrome Click!! |
 |
Let me first Introduce Introduction. |
| ICACT20220096 Slide.04
[Big Slide]
[YouTube] |
Chrome Click!! |
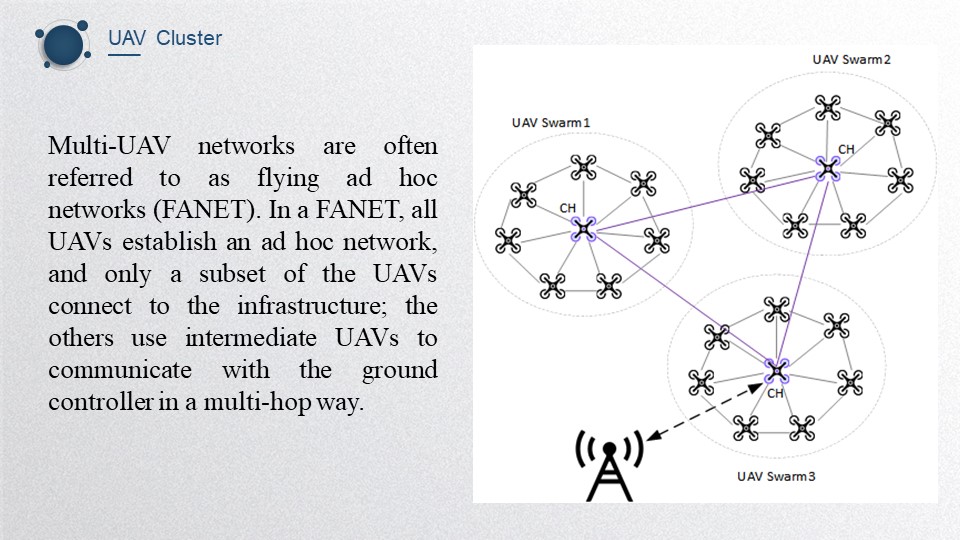 |
Multi-UAV networks are often referred to as flying ad hoc networks (FANET). In a FANET, all UAVs establish an ad hoc network, and only a subset of the UAVs connect to the infrastructure; the others use intermediate UAVs to communicate with the ground controller in a multi-hop way.
In the clustering approach, as shown in Figure. Each UAV can be seen as a node, and the UAV nodes are divided into different clusters. Within the effective communication range of the nodes, these UAV nodes can communicate directly with each other, sharing channels and resources. Each cluster chooses a cluster head that is responsible for managing inter-cluster and intra-cluster communication. The remaining UAVs within a cluster are called cluster members. Suitable cluster head selection strategy and efficient cluster management can reduce communication overhead, enhance network scalability, and maximize network throughput.
|
| ICACT20220096 Slide.05
[Big Slide]
[YouTube] |
Chrome Click!! |
 |
Unlike vehicular ad hoc network (VANET) or mobile ad hoc network (MANET), FANET has the unique features of high mobility, frequent topology changes, unstable wireless links, and limited energy resources. Therefore, this brings challenges to reliable communication and routing among UAVs
|
| ICACT20220096 Slide.06
[Big Slide]
[YouTube] |
Chrome Click!! |
 |
Then let me Introduce related work. |
| ICACT20220096 Slide.07
[Big Slide]
[YouTube] |
Chrome Click!! |
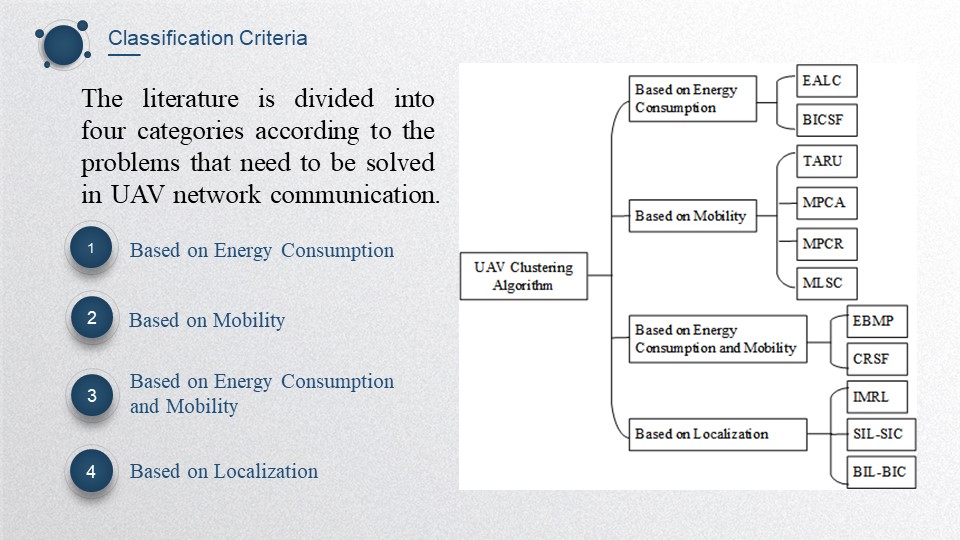 |
I will introduce the problems to be solved from the perspective of the following four categories. |
| ICACT20220096 Slide.08
[Big Slide]
[YouTube] |
Chrome Click!! |
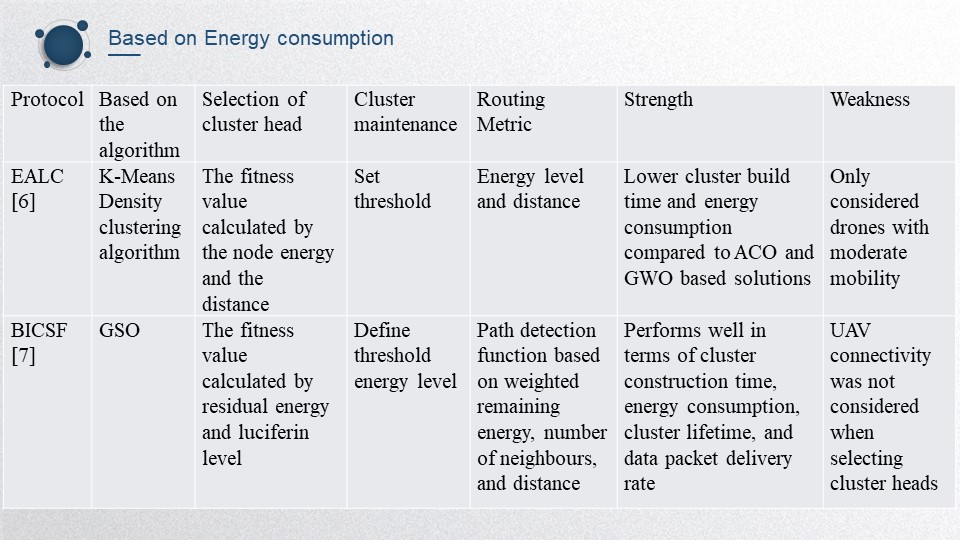 |
These cluster-based routing protocols in the table that address the energy consumption issue all consider the energy level of UAVs in cluster head selection and UAV routing, as cluster heads need to maintain inter- and intra-cluster communication and their energy consumption is higher than cluster member UAVs. A cluster head with a long lifetime can avoid frequent cluster reconfiguration, reduce unnecessary overhead and lower network energy consumption. This type of clustered routing protocol is adapted to scenarios with low mobility and the need to work for long periods of time, such as reconnaissance and monitoring tasks. |
| ICACT20220096 Slide.09
[Big Slide]
[YouTube] |
Chrome Click!! |
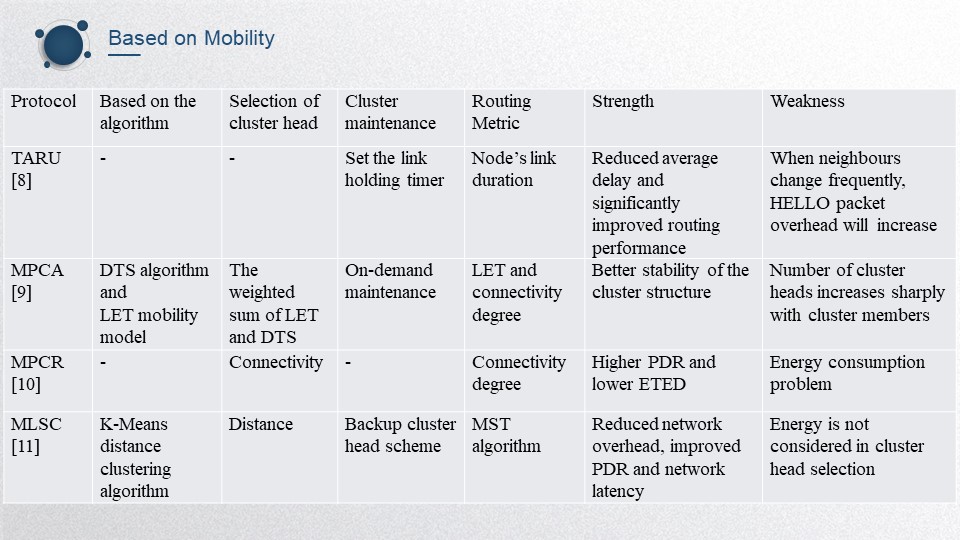 |
The cluster routing protocols mentioned in the table are designed to solve the problem of frequent network topology changes and link instability caused by the high mobility of UAVs, and basically take into account factors such as node connectivity and link duration when clustering and routing, and perform well in terms of packet delivery ratio and End-to-end delay performance. This type of protocol is suitable for delay-sensitive scenarios, such as transmitting audio and video data during the rescue. |
| ICACT20220096 Slide.10
[Big Slide]
[YouTube] |
Chrome Click!! |
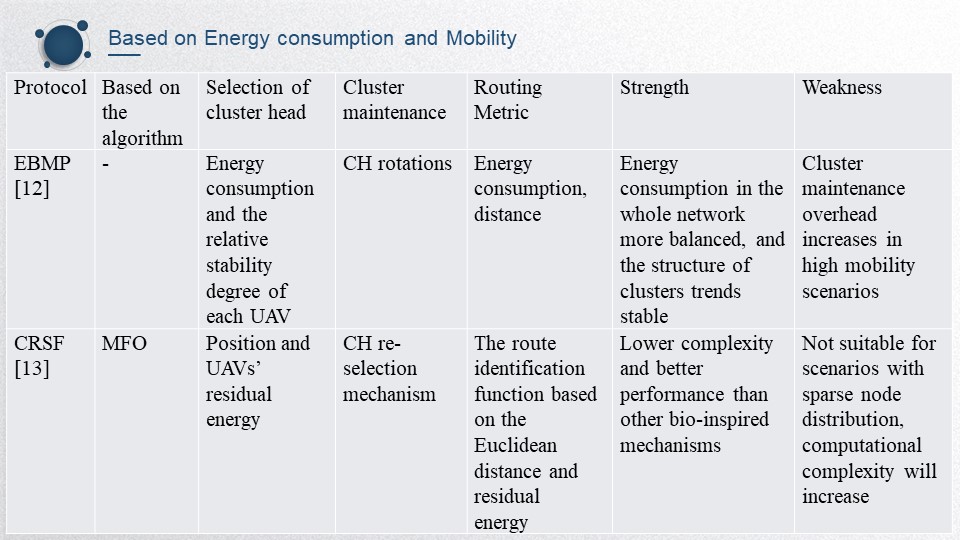 |
This type of clustered routing protocol considers both the high mobility and energy consumption of UAVs, and its cluster head selection takes into account energy and node degree to make the cluster survive longer. This protocol performs better in network energy consumption, throughput, and latency and is suitable for application scenarios requiring extended working hours and low latency. |
| ICACT20220096 Slide.11
[Big Slide]
[YouTube] |
Chrome Click!! |
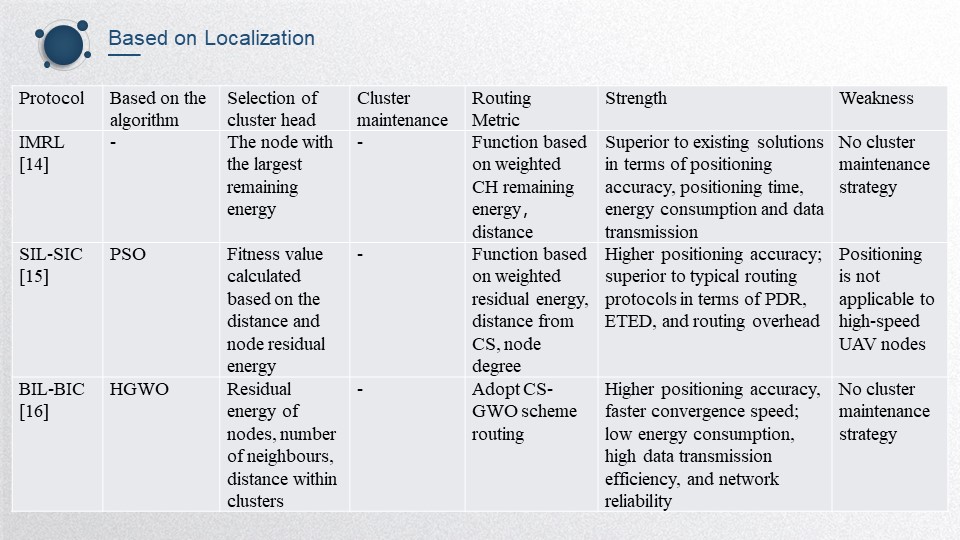 |
The localization method proposed by the cluster routing protocol in the table improves the accuracy of localization, based on more accurate location information for cluster head selection during clustering, and considers distance for next-hop routing during communication, with lower localization error and better performance. This type of protocol is suitable for scenarios with high localization requirements, such as post-disaster search and rescue. |
| ICACT20220096 Slide.12
[Big Slide]
[YouTube] |
Chrome Click!! |
 |
12. Next, I will introduce the Third part, the comparison of existing clustering algorithms. |
| ICACT20220096 Slide.13
[Big Slide]
[YouTube] |
Chrome Click!! |
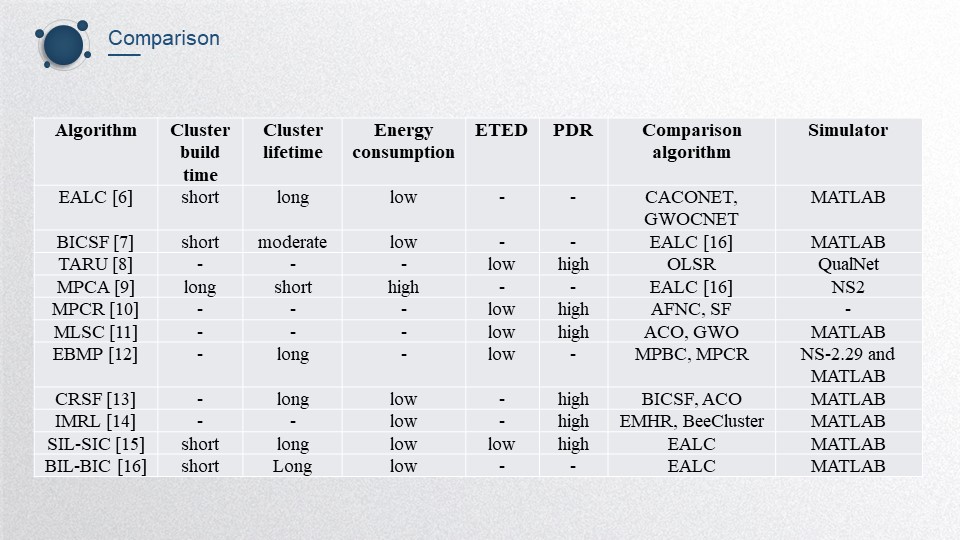 |
The Table shows the comparison of existing clustering algorithms in the different parameters like Cluster build time, cluster lifetime, Energy consumption, packet delivery ratio, and End-to-end delay.1) Cluster building time: The time taken to execute the clustering algorithm to form clusters and cluster head selection is called cluster building time, which represents the computational complexity of that algorithm. The shorter the build time, the lower the energy consumption. 2) Cluster lifetime: The time between cluster formation and cluster destruction. The longer the cluster lifetime, the fewer the number of cluster reconfigurations. 3) Energy consumption: The energy consumption of the entire network to execute the clustering algorithm with other algorithms. 4) End-to-end delay: The time difference between sending packets to the destination, the lower the delay, the better the performance. 5) packet delivery ratio: The ratio of the total packets received by the destination node to the total packets sent by the source node.
|
| ICACT20220096 Slide.14
[Big Slide]
[YouTube] |
Chrome Click!! |
 |
Next, let's go to the Fourth part, conclusion. |
| ICACT20220096 Slide.15
[Big Slide]
[YouTube] |
Chrome Click!! |
 |
In the future, large-scale UAV clustering is a significant development direction, and the resource management and network performance of UAV clusters can be improved through clustering, but due to some unique characteristics of UAVs, the existing clustering-based routing protocols for traditional MANET and VANET cannot be directly applied to UAV self-assembly networks, so the cluster management of large-scale unmanned self-assembly networks needs further optimization research.
It can be considered in two ways, (1) artificial intelligence can be considered to be applied to the clustering algorithm of UAVs, such as optimizing the formation of clusters and the selection of cluster heads, and achieving high-speed node localization, in order to make the clusters lifetime longer and the network as a whole consume less energy and perform better. (2) Intelligent UAV clusters based on the intelligent behavior of biological swarms.
|
| ICACT20220096 Slide.16
[Big Slide]
[YouTube] |
Chrome Click!! |
 |
The above is all the content of my presentation today, thank you. |